
목록책장/Computer Vision (6)
서랍장
◆1. Interest Points and Corners 일단 용어에 대해 잡고 넘어가자. Interest points 는 keypoints 를 뜻하고 이것들은 보통 feature 라고도 불리우기도 한다. 원래 이렇게 부르는게 아니지만 비전 공학 특성 상 뭐가 정확히 정의되어있다기 보다는 자기 편하게 부르기 나름이기 때문에 그냥 이렇게 알고 넘어가자. Correspondence Correspondence 란 매치되는 이미지를 이야기한다. 보통 두 이미지를 비교할 때, 이거를 kernel information 으로 사용한다. 보통 matching points, patches, edges, regions across images 를 뜻한다. Fundamental matrix 어떻게 매칭할 지에 사용한다. 다..
 [비전5] Frequency and Image
[비전5] Frequency and Image
◆1. Non-Linear Filters 이미지의 주파수에 대해서 알아보자. 픽셀 데이터로 되어있는 이미지를 픽셀의 변화 값에 따른 frequency 변화 값을 따로 뺄 수 있다. 이를 주파수라고 하면 해당 주파수 만을 뽑아내서 주파수 도메인으로 확인해볼 수 있다. 이 때 사용되는 변환 방법으로 푸리에 변환(Fourier transform )이 있다. 푸리에 변환을 통해 이미지를 변환하게 되면 보통 각 frequency의 Coefficient 값으로 표현한다. 이미지를 위의 그래프와 같이 각 주파수에 따른 Coefficient 만 남겨두는 식으로 압축(?!)해서 저장해둘 수가 있다. 또한 FFT의 교환법칙을 통해 CNN 에서의 for 문 3개를 쓴 세제곱 복잡도를 줄일 수 있다는 장점도 가지고 있다. 일..
◆1. Filters for features 이전에 필터링을 노이즈를 없애거나 줄이는 데에 사용한다고 했었다. 이제 어떻게 필터를 higher-level feature, 즉 의미있는 데이터를 뽑아내는 데에 사용할까에 대해 알아보자. 여기서 의미 있는 데이터란 edge, corner 와 같은 데이터를 의미한다. ◆2. templates matching : 입력 이미지에서 템플릿 이미지의 위치를 찾는 방법이다. template matching 은 template image 와 같은 사이즈의 window 를 가지고 source image의 모든 subimage 들과 비교하면서 유사도가 가장 높은 부분을 찾게 되는데, 크기가 같은 두 이미지 유사도를 구하는 방법 중 하나가 바로 NCC가 되는 것이다. (Norm..
작은 센서를 만들 때, 저녁이라는 시간 때문에 생기는 노이즈와 같은 문제가 생길 수 있다. 즉 이러한 경우 적당한 필터링을 통해 노이즈를 제거해주어야 한다. 이럴 때 쓰이는 필터란 무엇일까에 대해 알아보자. 1. Image? Intensity values (집약정도) 를 사용해 매트릭스 혹은 격자의 형태 로 표현한다. 즉, 이미지는 정수값의 행렬로 표현된다~ 정도만 알아두자. Images as functions : r,g,b 총 세 개의 함수가 내장되어있는 거라고 볼 수 있다. 2. Image 특성 이미지는 제한된 수만큼 픽셀을 보유한다. 픽셀 값→ grayscale은 0~255 → 컬러의 RGB 같은 경우, 각 채널 당 0~255 까지 각 1바이트로 총 3바이트 표현 가능하다. 3. Image 변환 수..
 [비전2] linear algebra
[비전2] linear algebra
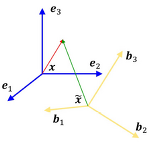
비전에 대해 알아보기 전에 기본적인 선형대수 개념을 매우 간단하게! 잡고 넘어가고자 한다. vector : 방향과 크기(Magnitude) 를 가지는 기본적인 기하학 객체 개념으로 잡고 넘어가면 편할 듯 싶다. vector operations dot product(inner product): 내적으로 벡터를 곱한다, 투영한다 라는 뜻의 연산이다. outer product: 외적으로 이는 왼손좌표계(DirectX), 오른손좌표계(OpenGL) 에 따라 값이 다르게 나올 수 있는데 기본적으로 방향에 따른 법선 벡터를 계산하는 연산이라고 생각하면 될 듯 싶다. vector norm : 선형대수학에서 놈은 벡터의 크기(magnitude) 또는 길이(length)를 측정하는 방법을 의미한다. 1-norm 은 벡터..
 [비전1] Introduction
[비전1] Introduction
컴퓨터 비젼 공학은 '미군'에서 군사목적으로 도입되었다가 현재는 많은 곳에서 사용되고 있다. 사람 얼굴인식, AR, 3D 모델링, OCR, Digital puppetry, Recognition, Self-driving cars등등 여러 곳에서 사용하고 있다. 이러한 비젼 공학의 제일 기본은 image pixel 로 부터 의미있는 데이터를 추출해내는 과정이다. 즉, 중간에 어떤 과정을 거치던 적절한 알고리즘을 통하여 pixel→output 을 해내는게 비젼 공학의 목표라고 할 수 있다. 그러면 이 이미지로부터 뽑아낼 수 있는 가장 기본적인 정보가 무엇일까? Semantic Information : 이미지에 대한 환경적 정보를 뽑아낼 수 있다. Geometric Information : 이미지의 거리, de..